Stabilisatie van de vinger
|
Iedere vinger heeft meerdere pezen welke de beweging en daarmee actieve stabiliteit controleren; 3 intrinsieke (mm. interossei palmaris en dorsalis en de mm. lumbricali) en 3 extrinsieke pezen. Aan de volaire zijde bij de vingers (digiti II-V) bevinden zich 2 flexorpezen: de m. flexor digitorum profundus en superficialis. De duim heeft maar 1 lange duimflexor: de m.flexor pollicis longus. Deze flexoren worden door een ingenieus pulley-systeem tegen de vinger/duim aangehouden, welke een soepele verglijding van de flexorpezen garandeert. |
|
|
|

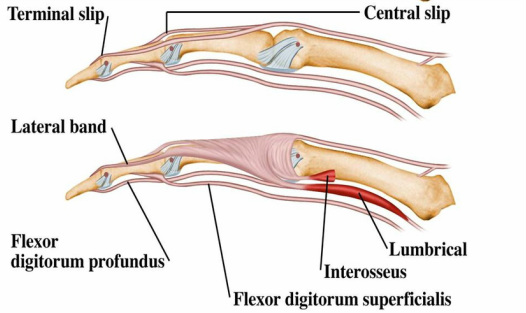
Unieke peessructuur van de m. flexor digitorum superficialis (FDS), welke een 'tunnel' vormt waardoor de m.flexor digitorum profundus (FDP) loopt
|
|
Het extensorapparaat
Aan de dorsale zijde insereren de gezamelijke vingerextensoren (m. extensor digitorum communis) op de extensoraponeurose. Deze aponeurose splitst ter hoogte van de schacht van de proximale phalanx in drie slippen. De centrale slip hecht aan op de middelste phalanx, terwijl de twee laterale slippen op de distale phalanx. De extensorpezen hebben ook laterale verbindingen met elkaar. Een experiment ter illstratie; wanneer u uw vuist op tafel legt met alleen uw ringvinger gestrekt, is het onmogelijk de ringvinger van de tafel te kunnen heffen. Hoe kan dit? De extensiemogelijkheid van uw ringvinger is gekoppeld aan die van de naastgelegen vingers door middel van intertendinogene verbindingen tussen de pezen van de extensor digitorum communis. Zolang de andere vingers niet mee kunnen strekken, krijgt u uw ringvinger niet van de tafel. De uitzonderingen op deze regel zijn de 2e en 5e phalanx zijn wel mogelijk, omdat deze een aparte extensor hiervoor hebben, resp. de mm. extensor indicis en extensor digiti minimi. |
|

De conjuncturae intertendinae
|

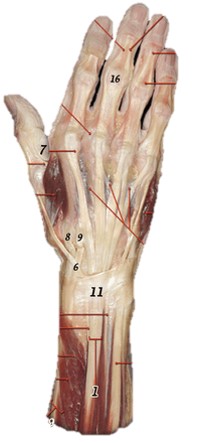
Het extensorapparaat in vitro
|
Dat bij het stabiliseren van de vinger zo veel tendogene structuren betrokken zijn heeft een reden. De vinger bestaat namelijk uit 3 phalangen, met 2 intermediaire gewrichten; het PIP- en DIP-gewricht. Dit vormt zo functioneel een bewegingsketen met twee samenwerkende gewrichten (een bi-articulaire keten).
Deze bi-articulaire keten kan niet in evenwicht worden gehouden met slechts twee pezen. Wanneer in dit model nog een 3e gewricht wordt toegevoegd (het MCP-gewricht), wordt het stabilisatieprobleem alleen maar groter. Dit geeft aan dat er meerdere tendinogene structuren in de vinger aanwezig dienen te zijn om de afzonderlijke gewrichten actief te kunnen stabiliseren.
Deze bi-articulaire keten kan niet in evenwicht worden gehouden met slechts twee pezen. Wanneer in dit model nog een 3e gewricht wordt toegevoegd (het MCP-gewricht), wordt het stabilisatieprobleem alleen maar groter. Dit geeft aan dat er meerdere tendinogene structuren in de vinger aanwezig dienen te zijn om de afzonderlijke gewrichten actief te kunnen stabiliseren.
